���Θ_�I�f�o�r����̍��{�I���
�`�}�^�ł͏d�͔g��u���b�N�z�[���̐M�҂傤���𗠕t����̂ɁA���܂��ɂf�o�r����������o����Ă���B�f�o�r�̎d�g�݂𗝉����Ă���Α��Θ_�ȂW�Ȃ����Ƃ͂����킩����ǃl�B
�C�O�̑��Θ_�w�҂��A�u�����f�o�r�̌��q���v�̑��Θ_�I����Ԃ�1�������Z������v�Ǝ��Z�����_�����@�^�������{�̊Ԕ����ȑ��Θ_���Ƃ����Ă��܂����̂����������̂͂��܂�B
���Θ_�̕K�v�������o���邽�߁A�P���Ɍ����x���|���Ăf�o�r�̌덷�Ƃ��Ĕ��\������������Ȃ��A������f�o�r�̉���܂ōL�߂Ă��܂����B���Θ_���������Ŗ𗧂��Ă���Ɗ��Ⴂ���Ă���l�́A�f�o�r�̌������Ċm�F���đ��͂Ȃ��Ǝv�����B
point
�f�o�r�����Θ_�̏ؖ��ɂȂ�Ƃ����ӌ��́A
�f�o�r�̌��������{�I�Ɍ�����Ă���
- ���Θ_�I�f�o�r����̍��{�I���
�@�@�@�����̖ړI�͑��Θ_�̃A�s�[��
�@�@�@�K�v�Ȃ͎̂����f�[�^�̏������@
���Q �f�o�r�ƃJ�[�i�r�̎��������ɒ��ڂ��悤
�@�@�@�@�����Ǝ��Ԃ��͂������ʂ���
�@�@�@�@�J�[�i�r�̎��v�͖��W
�@�@�@�@��M�����͌v�����Ă��Ȃ��I
�@�@�@�@�悭����f�o�r�̊��Ⴂ

����A�O�ӑ��ʂ̌��������I
�f�o�r�����Θ_�̏؋��ɂȂ��Ă�Ƃ����ӌ��ŁA�f�o�r�̎d�g�݂���������T�C�g��L�����������邱�Ƃ��悭����l�B
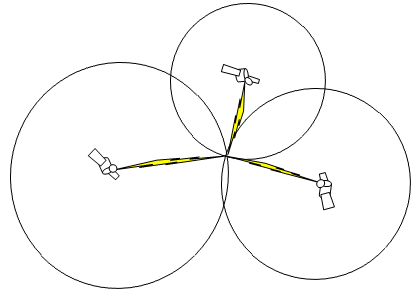
�R�ȏ�̐l�H�q�����M�����������Ǝ�M���������̍�����A�l�H�q���Ǝ�M�n�_�̋������킩��B�f�o�r�q���̍��W�͂킩���Ă��邽�߁A�e�l�H�q�����狅�ʂ̌�_�Ƃ��Ď�M�n�_�����肳���̂ł���B
���̌v�Z�Ɏg�������x�́A1��������̑��Θ_����Ԃ�38�}�C�N���b��11km���i��ł��܂��B���̕���Ȃ���J�[�i�r�͂ƂĂ��g�����̂ɂȂ��̂��B
�܁A���Θ_�̂������ŃJ�[�i�r�g���Ă܂����ăE���`�N�́A������������Ȋ����̐}�łf�o�r�̌��������������ŁA�����x�Ƒ��Θ_��1���̕�����|���Z���āA�u�A�C���V���^�C���A�X�S�C�I�v���ĊS���Ă���p�^�[���������B
�����̐l�H�q���̃f�[�^�������̂P�_���A�u���o���Ă���Ƃ����̂͊�{�I�ɊԈ���ĂȂ��悤�Ȃ��ǁE�E�E
�܂�A�F���K�͂ő��ʂ��Ă���Ă��Ƃ��l�B
�����Ƃ���B�F���K�͂ŋ��������m�ȑ������\�ɂȂ����̂͑��Θ_�I��̂������ł���B������Ȃ���P���ɐ�km���덷�������āA�ƂĂ��g�����̂ɂȂ�Ȃ������̂��B
�������������Ă�Ƃ������ƁH
�ǂ��ɑ��Θ_���W���Ă�́H
�l�H�q�������M�n�_�̊Ԃ�d�g���͂��܂ł̎��ԂƓd�g�̑��x���|�����킹��͋������o��B���̑��x�͓��R�A�����x���̗p���邽�߁A�킸���Ȏ��ԕ�ł��v�������ɑ傫�ȉe����^����̂��B
���̕�͂��łɂf�o�r�ɍ̗p����Ă���A���Θ_�����Ȃǂƌ����Ȃ�J�[�i�r���g�����i�͂Ȃ��I
���v�B���̐����̂f�o�r�𗘗p���Ă�l�Ȃ�Ĉ�l�����Ȃ����B�����āA����̂��炩�炠���O�ӑ��ʂ̌���������������������B�f�o�r�̐�������Ȃ��I
������Ăǂ��������ƁH
�����̖ړI�͑��Θ_�̃A�s�[��
�J�[�i�r���g�т��|�P�����f�n��
�@���Θ_�i��X���Ɓj�̂������ł���I
�@�����̂��߂̐ŋ���ɂ���ł͂Ȃ�Ȃ��I�I
�������Ȍ��{�R�@������A����ȑ��u����葱����̂ɑ��z�̐ŋ��g���Ă邱�Ƃ����܂�Ȃ��悤�ɁA���Θ_�����ɗ����Ă邱�Ƃ��A�s�[������̂ɕK���B������݂�ȁA�f�o�r�̑��Θ_�I��������ł��Ȃ��Ƃ����b���炫�Ă���B
�����āA���̌v�Z�ɓo�ꂷ��̂��O�ӑ��ʂ̌��������Ő�������Ă�f�o�r�B���������A�Ȃ�œ��{�ł́u�J�[�i�r���@�\����̂͑��ΐ����_�̂������v�Ȃ�āA�����܂����s�s�`����������Ă���낤�ˁB
���Ƃ͂Ƃ����A�ߔN�ɂȂ��āA���̑��x�Ƃ������ꂽ���퐶���ɉ��̉��b�������炵�Ă��Ȃ����ΐ����_�̋^���Ȋw�����F�������悤�ɂȂ�ƁA�{�����菤�����Ă���w�҂����������肳���悤�ɂȂ��ė����B���W�ϊ��̃~�X���甭�����Ă鎞�_���������E�ɉ��p�ł���킯�Ȃ�����l�B
���傤�ǂ���Ȏ��A���܂���ɊC�O�̃j�[���E�A�V���r�[�Ƃ������Θ_�w�҂��A�f�o�r�q���ɓ��ڂ���Ă��錴�q���v�̑��Θ_�I��ʂƂ��ĂP���ݐς����ꍇ�̎��Z��_���Ŕ��\�����B������������{�̂��o�J�ȑ��Θ_�w�҂��A����Ɍv�Z����P���ɏ��������āA
���Θ_�I��̌��� ���i���Θ_�ɂ���P���������̂����j�~�i���x�j
�@�@�@�@�@�@�@�@�@�@ ���@�����̂���R�W�}�C�N���b���@�@�~�@�R�O���j��/�b
�@�@�@�@�@�@�@�@�@�@ ���@�P�P����
�@�@�@���Θ_�I����Ȃ���A�J�[�i�r�͂ƂĂ��g�����ɂȂ��B
�ƁA�킸���Ȏ����C�����Ɍ������|�����킹���ă��m�X�S�C�������o���Ă��܂����B
�������A�j�[���E�A�V���r�[�����Θ_�̗L�p�����A�s�[�����悤�Ƃ����͓̂��������ǁA���ۂ̂f�o�r�̌v�Z���@�ł͂Ȃ��A�����܂����z�I�ȃV�X�e���ł̎��Z�Ƃ����J�^�`�Ŕ��\���Ă���B
�Z�p������̏ڂ��������Ƒ��Θ_�I�Ȑ����ł͍��{�I�ɖړI���Ⴄ�̂ŁA���R�A�v�Z���ʂɈႢ���o�Ă���B���ʂȂǂ̋Z�p�I�Ȑ����ł́A���m�Ȑ��l�ɋ߂Â����邽�߂Ɍv�Z��@���H�v����Ă���̂ɑ��āA���Θ_�I�����ł́A�����Ɍ덷���傫���o�đ��Θ_�̕K�v�����A�s�[���ł��邩�Ƃ����̂��ۑ�ɂȂ��Ă���B
���̂��߂ɁA���ۂɉ^�p����Ă���V�X�e�����덷��傫���o���Ă����V�X�e���̕����D�s���B�����A���ۂ̂f�o�r�V�X�e���Ɠ����悤�ɑ��Θ_�I�v�Z������A�u�ȂA���Θ_�̉e���Ȃ�đS�R�Ȃ������I�v���āA�݂�Ȃ��[�������Ⴄ�Ƃ������ԂɂȂ肩�˂Ȃ��B�����ŁA
�f�o�r�̎d�g�݂͒P���ł���B
�ƁA���Θ_�I������ʓI�ɑ��E���Ă���V�X�e���̉��Z������S���ȗ������ˋ�̂̂f�o�r��o�ꂳ���Ă��܂��B���ꂪ�O�ӑ��ʂ̌��������Ő�������Ă�f�o�r�����B�{���̂f�o�r�̊J���҂́A���ڂ��錴�q���v�ɉ�������1�b�̑��Θ_�I��Ő��L�����̌덷���o�Ă��܂��Ȑv������قǃ}�k�P����Ȃ��B
���Ȃ݂ɓ��{�ő��Θ_��A�C���V���^�C���̂������Ƒ����ł�
point
�f�o�r�V�X�e���̖{���̊J���҂́A
�u���b�h�t�H�[�h�E�p�[�L���\��
(Bradford Parkinson)�����B
�}�C�P���\�����v�����č���Ȍv�����\�ɂ����}�C�P���\��������R�l�Ŕ����Ƃ��������ǁA��l�Ƃ������A�C���V���^�C���Ɍ��т�����肳���Ȃ�Ċ���l�B�܁A���̒����ׂđ��Θ_�̂������ƍ��ꂷ��w�҂����邵�A��l�̌��тɌh�ӂ��Ȃ��w��͉Ȋw�̐��E�ɕK�v�Ȃ��C������B
�K�v�Ȃ̂������f�[�^�̏������@
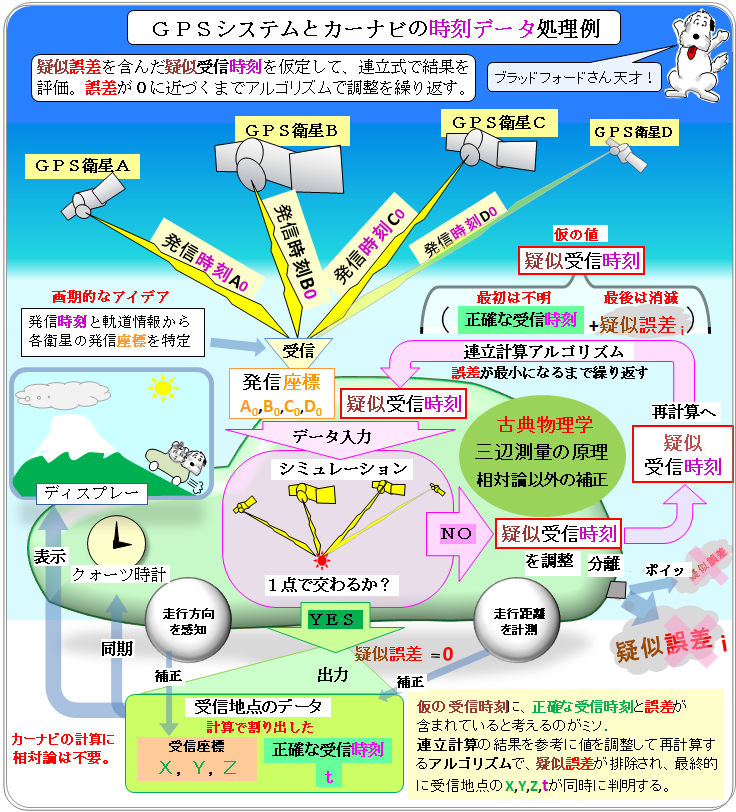
�f�o�r�q���ɓ��ڂ��ꂽ���q���v�����Θ_�I�ȕ�Ői�ݕ�������Ă���Ƃ������Ƃ́A�������Ȃ��Ƃ��Ɣ�ׂĎ����������Ƃ������ƁB�܂�A���Θ_�I��̉e�����v�Z����ɂ��f�o�r�������f�[�^���ǂ��������Ă邩��m��K�v�������l�B
�f�o�r�q������M�������M���ꂽ�����ƃJ�[�i�r����M����܂ł̎����̍��ƌ����x���|�����킹�ē`���������Z�o���Ă���B���M�����ɑ��Θ_�̉e�������ڌ���邩��ł���B
�����ȂB���̂��߂ɂf�o�r�̎d�g�݂�������Ă�l�B�ł��A�قƂ���O�ӑ��ʂ̌��������ōς܂��Ă�̂́A�Ȃ��H�@�O�ӑ��ʂ́u���v�͕����ʂ�ӂ������̂��Ƃ�����A���q���v�̕�Ƃ͊W�Ȃ��悤�ȋC������B
�f�o�r�q������̓d�g���J�[�i�r����M����܂ł����������O�ӑ��ʂ̌����̊e�ӂɑ�������ł͂Ȃ����B���̕ӂ��猻�ݒn������o���f�o�r�̎d�g�݂��O�ӑ��ʂ̌����ʼn�����邱�Ƃ͉�����Ȃ��I
����Ȃ��āA���q���v�̎����f�[�^���ǂ��������邩��m�肽�������̂ɁA�O�ӑ��ʂ̌��������Ă���ꂽ��z���}�c�e���g�E����Ȃ������Ă��ƁB�d�g�ő��낤�Ɗ��ڂő��낤�ƁA�v�����I������f�[�^�����p���邾���̘b������B
������H�@������@�����肵�Ă��Ȃ��Ȃ�A�d�g�𗘗p���Ă���f�o�r���Y������ł͂Ȃ����B
�w�҂��{�C�ŋC�Â��Ȃ��̂��A�킴�ƂƂڂ��Ă���̂��킩��Ȃ����ǁA�O�ӑ��ʂ̌����́A�͂��߂���C�ӂ������̕ӂ������^������āA�e�ӂ̌Œ肳�ꂽ��[�𒆐S�ɋ���`�����Ƃ��Ɍ�������P�_�����߂���́B
�������ꂽ�����͈͓̔��Ŗ����������悤�Ƃ�����A�ӂ̒����̋��ߕ��₻�̌v���v���Z�X���C�ɂ��邱�ƂȂ��A�����^����ꂽ�������g���č��W����肷����������B���q���v�����Θ_�I��������ς݂ŁA�e�f�o�r�q������̋������m�肵�Ă����Ԃ�z�肵�Ă����l�B
�������������Θ_�I����܂܂�Ă��邩�炱���A
�@�ォ��ł���̌��ʂ��Z�o�\�Ȃ̂��B
�������ȁH�@�����Ő������āA���������Ă�[���l���Ă݂悤�B
�܂��́E�E�E
���Θ_�̗L�p���̗��ɐ旧���āA
�f�o�r�̎d�g�݂��O�ӑ��ʂ̌����̃��f���ɂ���ĊȈՓI�ɐ��������B
���������́A�����������f��������Ă��Ȃ����Ƃ������Ă���B
����ɁE�E�E
�f�o�r�q���ɓ��ڂ���Ă��錴�q���v�����Θ_�I����ؖ����邽�߁A
����ɑ��������`�����Ԃƌ����x���|�����킹�ĕ���������v�Z���A
�����ł��Ȃ��قǂ��덷���Z�o�ł������ƂŁA���Θ_�̗L�p���𗧏����B
�@�i�������A
���̌����f���ɂ́A�f�o�r���L�����������͊܂܂�Ă��Ȃ��B�j
�Ƃ������Ƃ́E�E�E
�f�o�r��J�[�i�r�ɂ��������Θ_�I�����̉e����L�p���́A
�f�o�r�����������v�Z�����O�������f���ŗ�����Ă���B
�Ȃ�R�����[�I�@���Θ_�I�����̏ؖ����āA�͂��߂������������̓����Ă��Ȃ��ȗ������ꂽ�f�o�r���f�����Љ�Ƃ��āA�Ō�܂����Θ_�I����������Ȃ��悤�ɂ��Ă��l�B�o�J�o�J�����B
����Ⴛ������˃l�[�B�F������ł�l�H�q���𗘗p���āA�P�����̂P�b����ɂ��Ă�V�X�e���Ȃ���A���w�Z���x���́m�����̌덷�n�~�m�����x�n�̐����P�ŃV�X�e���S�̂̐��x���v�Z���܂������Č����Ă��l�[�B
���v�@�\�̕t�������g�����V�Ƃ����ƁA
�u�悤�V����I�@���������Ă˂����g�����疜km���덷�o���܂��̓�����O������I�@�덷��������˂�����́A���ڗp�ӂ��Ƃ����Ă���قnj���������˂����I�v
���āA���ʉ����邠�邾�Ǝv���H�@����ȃo�J�Ȑv���Ă鑪���A�[�b�^�C����Ȃ���l�B
���ہA���Θ_�I����������q���v�̉e���Ȃ�āA���̑��̌����Ɣ�ׂ�Ƃ��܂�����������āA���ʊW�̎����Ȃ�A�u�f�o�r�ɂ����������Θ_�I��́A���̌덷�v���Ɣ�r���ċɂ߂Čy���ł��邽�߁A�����ł͒P�ɏЉ�ɗ��߂�v���x�����G����Ă��Ȃ��B
�܂Ƃ߂�ƁA
point
�f�o�r�ɂ��������Θ_�I������̌��́A
��E���������������ȗ������f�o�r
���Љ�邱�ƂŐ������Ă���B
���ǁA�j�[���E�A�V���r�[�����z�I�ȃV�X�e������n�܂��ē��{�ŃA�����W���ꂽ���Θ_�I������́u�덷�P���P�OKm���v�́A�C�O�ł��g�U����Ă�B���{�Ŏ����̃E���`�N���A�C�O�Łu���f�ȓs�s�`���v�Ƃ��ċ^���Ȋw������Ă�̂ɁA����ł����́H�@���{�̉Ȋw�B
�f�o�r�ƃJ�[�i�r�����������ɒ��ڂ��悤
���Θ_�I������Ői�ݕ���ς������q���v�́A���M����������ς��Ă��܂��B���������,�J�[�i�r�������Ă����ʒu���ɂ��_�C���N�g�ɕ\���Ƃ����l�����́A�f�o�r�̎d�g�݂����Ă���B
�����̂f�o�r�q������������f�[�^���ǂ��������Ă邩�́A�J�[�i�r�ɓ�������Ă��鏈����H���ڍׂɒ��ׂ�K�v������B�ł��A������O�����ǁA���ꌋ�\���G�ł߂�ǂ������B������A�����f�[�^�����̗���̈ꕔ�����ł��Љ�悤�Ǝv���B
��������������E�o����ƁA���܂Ō����Ȃ����������Ȃ��Ƃ������Ă���B�ȒP�Ȃf�o�r�̐��������ŕ��������C�ɂȂ��Ă��l�́A���̍I���ȃA�C�f�A�Ɋ������Ȃ��H�@���ꂪ�S�̂̂ق�̈ꕔ�����Ă������������������ςȂ��I
�����Ǝ��Ԃ��͂������ʂ���
�܂��A��Ԓ��ӂ��Ȃ���Ȃ��̂́A�����M���𑗂��Ă����f�o�r�̎d�g�ݏ�A����������ɂȂ���Ă��ƁB�����Ǝ��Ԃ������ɕ����čl���Ȃ���Ώ����̗����ǂ��Ӗ����Ȃ����B
����Ȃ̓�����O����Ȃ����Ǝv����������Ȃ����ǁA���ۂɁA�A�C���V���^�C���͓��ꑊ�ΐ����_�̘_�����ŁA�����Ǝ��Ԃɓ����������g���āA���̓W�J���ԈႦ�Ă���B�u�J�[�i�r�͑��Θ_�̂������v��A���̑���ʂ̍r�����m�ȗ��_�́A�����Ǝ��Ԃ������ɕ������Ȃ��������R�̌��ʂ����B
���āA�q���ɓ��ڂ���Ă��錴�q���v��1��������45������1�����i�ݕ����s���m���Ƃ���A���R�A���M����������Ă��܂��B���������M�����������悤�ɂ����Ƃ���ƁA�J�[�i�r���łf�o�r�q���̋O��������o���Ƃ��ɑ������ꂽ�Ƃ��납��M���������Ɗ��Ⴂ���邱�ƂɂȂ�B
�����A���̑��Θ_�I�ȉe���͖����ł���قǏ������������Ƃ�ʃy�[�W(�J�[�i�r�̑��Θ_�I���ʂ̓E�\)�Ō����Ă���̂ŁA���͂��̂��Ƃ̏�����S�̓I�Ɍ��Ă݂悤�B
�����I�Ȃ̂́A�����M�����J�[�i�r�ɓ����Ă���A�ŏI�I�Ɏ�M�n�_���͂����o���܂ŁA�����̃f�[�^��K�v�Ƃ��Ă��Ȃ����ƁB�q������̋����Ŏ�M�n�_�̍��W�����߂�Ȃ�A���������͂���Ă��Ȃ��͕̂s�v�c����Ȃ��H
���M��������M����������������Γ`�����Ԃ��v�Z�ł��A�����Ƃ������킹��������o��ł͂Ȃ����B
������������B�����ǁA�͂��߂ɋ^���I�ɐݒ肵����M������A���v�Z�Ŋm�肷��̂����M�����ƂȂ�ƁA���Θ_�̂͂Ȃ��͑����ꂾ��l�B�����f�[�^�Ɋ܂܂�Ă��錴�q���v�̑��Θ_�I����͑��E����Ă��܂�����l�B
�P��������S�T�����̂P�b�̈Ⴂ���o��M�����A���M����Ď�M�����܂ł̖�O�D�P�b�̊Ԃɔ������鎞���̌덷���������̘A���v�Z��������Ă��邱�ƂɂȂ�B��������ƌv�Z����ƂP.�RCm�قǂōςރn�Y�B�ǂ����đ��Θ_�̐��Ƃ��o�����͂V�P�^�A���悻�P�疜�{���������ς����Ă��܂��낤�ˁB
�J�[�i�r�̎��v�͖��W
�s���m�ȃJ�[�i�r�̎��v����ǂ������ ���m����M�������ǂ�����Ċ���o���Ă���́H
�J�[�i�r�ɂ͂f�o�r�q�����ڂ���Ă��錴�q���v�ɔ�r���ċɂ߂ĕs���m�ȃN�H�[�c���v���g�p����Ă���B���������Đ��m�Ȃf�o�r�������f�[�^�ŁA�J�[�i�r�̎��v������K�v������B���̕�𐳂����s��Ȃ��ƁA���͂�J�[�i�r�͋@�\���Ȃ��Ȃ�B
����͂f�o�r�q���̕�Ƃ͕ʂ̃J�[�i�r�����̕�̘b�Ȃ��ǁA�Ȃ������ꂪ�f�o�r�V�X�e���̓����Ƃ����፬���ɂȂ��Ă邱�Ƃ�����B
���x���P�����}�P�O�b�����Ȃ��N�H�[�c���āA�P���������O�D�R�b�̌덷���o��B������S�T�����̂P�b�̌덷�łP�O����������Ă��鑊�Θ_���v�Z�ɓK�p����ƁA�P�b������A
�P�O(�q)�~�o�S�T�����O�D�R(�b)�p���S�T�O������
�̌덷�ɂȂ�B���炩���ߔ��M�����œ��������Ă������Ƃ��Ă��`�����ԂɂO�D�P�b�����邩��S�T�������̌덷�H�@�����m���Ɏg�����ɂȂ�Ȃ��B
�ł��҂Ă�A���̐����������������ǁA
�����������̂��߂ɓ�������́H
�J�[�i�r�̎��v�A���Ȃ킿��M�����̕��Ɍ덷���܂܂�Ă��ẮA
�q������d�g���`���������Ԃ����m�Ɍv���ł��Ȃ��B���̂��ߒ���I�ɓ�������K�v������B
���������f�o�r�q���łS�T�����̂P�b�̒��������̂ɁA
�Ō�ɃJ�[�i�r�̃N�I�[�c���v�ɗ�����ă}�k�P����Ȃ��H
�����瓯�������Đ��m�Ȍ��q���v�Ɏ��������킹��K�v������̂��B
��������āH�@�悯���}�k�P���ۂ��Ȃ��Ă��ǁB
���Θ_�Łu�J�[�i�r���̎��v�����Ă��邩�琳�m�Ȉʒu���E�E�E�v�Ƃ����b��v��ƁA�e�q���������M�����ƍ��W��A���������̃A���S���Y���Ő��m�������������������Ă�͂��Ȃ̂ɁA�J�[�i�r���̎��v�Ɠ������Ă��̎��v����M��������`�����Ԃ��v�Z���邱�ƂɂȂ��Ă�B
�P���ȋ^��B�������Ă�����N�H�[�c���v�͂������ƌ덷�����o���Ă����l�B��M���Ă�����M�����v�Z���Ă�ԂɂƂ�ł��Ȃ��قǑ�ʂ̌덷���o������āA�N�H�[�c���v�̎������̗p���邱��͎g�����Ȃ�Ȃ��قnj덷���炯�ɂȂ��ĂȂ��H
�u�J�[�i�r���̎��v�����Ă��邩�琳�m�Ȉʒu���E�E�E�v�́A�����������̒��x�̗����B����ᐳ�m�Ȍ��q���v���琳�m�Ȏ������Z�o������A���łɃJ�[�i�r�̃N�H�[�c���v�����킹�Ƃ������Đv���Ă�̂͗\�z�ł���B�ł��A�N�H�[�c���v����Ɏ�M�n�_������o�����ĉ��߂����Ⴄ�̂͂ǂ��Ȃ�l�B
point
�J�[�i�r�̎��v���ł����
��M���������̌�
�Ȃ���B�t�c�[�͌v�Z�ŏo�������m����M�����g���ł���B
�ɒ[�Șb�A�J�[�i�r�̃V�X�e���N���b�N���������Ă���A�J�[�i�r�{�̂̎�M�����ȂȂ��Ă��A�A���S���Y���̍H�v����ʼn��Ƃł��Ȃ�B����̎��Ԃ������l�ɍ̗p�������āA�����Ƃ����ԂɃA���S���Y�����������Đ��m�Ȍ��ݒn���͂����o���Ă����͂��B
�������A����̎��Ԃ��ƃ_�C�G�b�g���Ă�l�����邩��A�u�N�I�[�c��������M�����ł�����Ƃ��A���܂ɓ������Ă邩��v���āA����Ȃ������B
��M�����͌v�����Ă��Ȃ��I
�J�[�i�r�̃N�H�[�c���v�̓����̘b��A�f�o�r�q�����̑��Θ_�I��̑傫�����b��ɂȂ�̂́A�ˑR�Ƃ��āA�u��M�������v�����Ă���v�Ƃ����v�����݂����邩�炶��Ȃ����ȁB�����܂ŘA���v�Z�ƃA���S���Y�����o�Ă����̂Ō��_�������Ă��܂��ƁA
point
��M�����́A�v�Z��̒l������
�v�����Ă���@��͑��݂��Ȃ��B
�Ƃ��낪�A
�f�o�r�̌v�Z���ɂ̓J�[�i�r����M��������͂��鍀�����݂���B������v�����āu���m����M�����v�ɕ���Ă��邩�炱����M�n�_�̍��W���킩��̂��B
�Ƃ�������������B������悭�悭���ʊW�̎��ɏo�Ă���u���m����M�����v�̈��������Ă݂�ƁA
�u�^����M�����v=�u���m����M�����v+�u�덷�v
�ƂȂ��Ă��āA�s���ȁu���m����M�����v���u�덷�v�Ƒg�ݍ��킹�āu�^����M�����v�ɂ��Ă���B���������́u�덷�v�Ƃ����̂́A�͂��߂̂������^���덷�ƍl���A�A���v�Z���J��Ԃ������Ɍ���Ȃ��O�ɋ߂Â��Ɠ����ɁA�^���̈��������ł����B�����čŏI�I�Ɂu���m����M�����v�������c����邱�ƂɂȂ�B
���̃A���S���Y���̓J�[�i�r�̐��\�����E���邩��A�����ȃ��[�J�[�̊J���҂͓Ǝ��̍H�v�����čŏ��ŒZ�œ������o���A���S���Y�����l����Ǝv���B���Θ_�I�Ȕ��z�ŃV�X�e����v�����Ƃ�����A�����̂̓J�[�i�r����Ȃ��đ��Θ_�̖{�����B
���̗����}�ɂ���ƁB
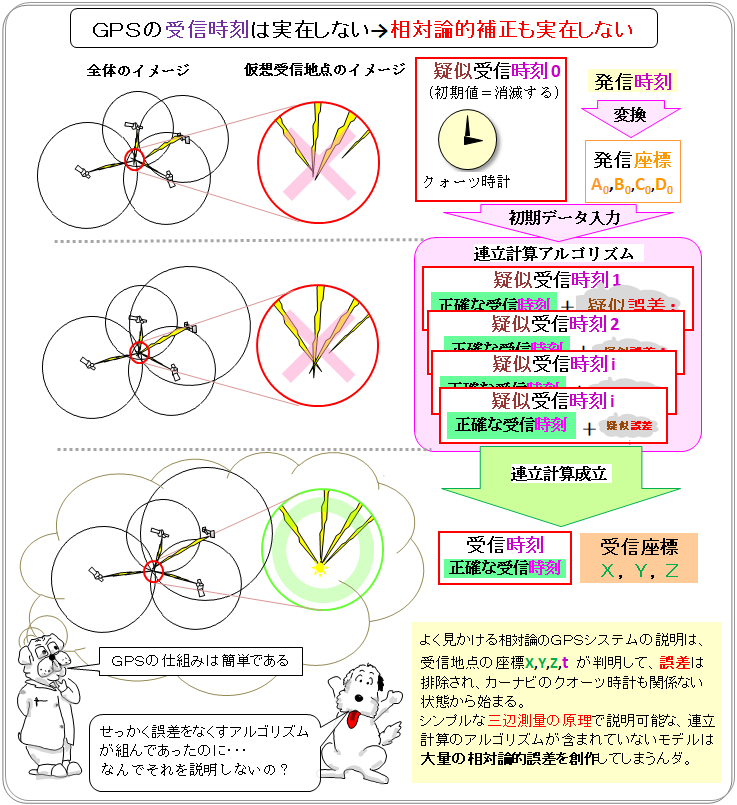
���ɐݒ肵���u�^����M�����v�́u���m����M�����v�ɍ����ւ��B�������A���ɃJ�[�i�r����M�����������l���č̗p�����Ƃ��Ă��A�ŏI�I���덷�ƂƂ��ɏ��ł��Ă��܂��B
point
�J�[�i�r�≼���^����M������
�������邽�߂ɂ���B
�����܂ŁA���Θ_�I������Ȃ������Ƃ��ɏo�Ă���傫���덷�Ƃ����̂͂́A�ǂ���A���v�Z�̃A���S���Y���ŏ�������Ă܂��Ƃ������Ƃ��킩�����l�B���̍H�����܂܂Ȃ��O�ӑ��ʂ̌������g���đ��Θ_�Ǝ��̂f�o�r�V�X�e����������邱�ƂŁA���Θ_�I��̑�����A�s�[������Ă��邱�Ƃ��B
�S�T�����̂P�b�̕��ǐՂ���c�_�ɁA���ۂ̃V�X�e���Ƃ͈Ⴄ���f���Ő������Ă��闝�R���킩��Ȃ���A�������Ȃ����R���킩��Ȃ��B����ł����̂Ȃ������S������̂��Ȋw�҂̖�������Ȃ��H�@
�悭����f�o�r�̊��Ⴂ
�u�J�[�i�r�͑��ΐ����_�̂������v�ƐM���Ă��܂����l�������ꉞ�͎����̓��ōl���Ĕ[�������Ǝv���B�����A�قƂ�ǂ��f�o�r�V�X�e���̌�����������炫�Ă���B���̌���������͑��Θ_�̐��Ƃ�������A���̐��������V�b�^�J��������A���̃p�^�[���͗l�X�B
��ʂ̐l���J�[�i�r�̎d�g�݂܂ŏڂ����m��K�v���̓}�b�^�N�����Ȃ����ǁA���̂܂܂��Ƃ܂����p���ꂻ��������A�f�o�r�ƃJ�[�i�r�̌�����������w�E���Ă����K�v�����肻���B
4�̖��m���͋��̔��a�H
�S�̋���������M�n�_��E�o���邽�߁A�S�f�o�r�q������̋����A�܂苅�̔��a�����m���ł���B
����́A�f�o�r�̎d�g�݂����ʼn�������}���炭�����B�m���ɂf�o�r�q�����S����Η��z�I�B�{���̖��m������M�����̍��W�������Ǝ����������߂��S�B���̂S���f�o�r�V�X�e���̓����Ŕ�������u�Ԃ܂ŁA���̔��a���s���B
�S�ڂ̂f�o�r�q�����K�v�Ȃ̂͌�_�����肷�邽�߁H
�����R�ł͌�_���Q�_�������Ă��܂��B
�P�_�ɓ��肷�邽�߂ɂ͂S�ڂ̂f�o�r�q�����K�v�Ȃ̂ł���B
�������������}�ɂ�����B�Q�_�̂����P�_�́A�͂邩���ɂ��邩��킩��ł���B�킴�킴�S�ڂ̂f�o�r�q���ɗ���ȂĂ��A��M�n�_�̍��x������z���W�Ƃ��Ďg���邵�B
�����܂ł���M�������܂����m�����S������K�v�Ȃ����B
�A���v�Z�ƕ��ʂ̌v�Z�̈Ⴂ�́H
�����̖��m�������߂�̂ɗL���Ȃ���ӂꂽ��@�ł���B
�����w�ł͓�����O�̂悤�Ɏg���Ă����@�Ȃ̂ɁA�v�Z�̗�����l����Ƃ��Ɍ����Ƃ������Ȃ̂́A
���̐����Ɠ����ɂ��ׂĂ̓����������ɔ�������Ƃ����_�B
�J�[�i�r�����̌v�Z�ł́A���̔��a�ƌ�_�͓����ɔ�������B
�i�f�o�r�͔����������a�����_�����߂郂�f���ł͂Ȃ��j
���q���v�͑��Θ_�I�����Ă���H
�q���O���ƒn��ł͑��Θ_�ɂ���Ď��Ԃ̐i�ݕ����قȂ�B
�f�o�r�q���̌��q���v�̕�̂������Œn���Ɠ����o���Ă���B
�n���Ɠ������Ƃ�Ă�̂����Θ_���ʂ̂��������Ƃ���ƁA
�F����Ԃŕ�����M�����n���ɓ͂��܂łɉe������n�Y�B
����L�����Z�����ꂸ�ɒn�\�ɂ܂œ͂��Ă���Ƃ������Ƃ́A
���q���v�ɓK�p����Ă����́A���Θ_�Ƃ͊W�Ȃ��B
�d�͂̈Ⴂ�Ŏ��Ԃ̐i�ݕ����Ⴄ�H
��ʑ��ΐ����_�ɂ��Ώd�͂ɂ���Ď��Ԃ̐i�ݕ����قȂ�B
�n���̕\�ʂ��f�o�r�q���̎��Ԃ͑����i��ł��܂��̂��B
�d�͂������Ǝ��Ԃ��������i�ނȂ�A�n����46���N�O����A
�n���̕\�ʂ��q���O���̋�Ԃ̎��Ԃ͖�P�N�����ɂ���H
�q�������A���^�C���Œǔ��\�Ȃ畨�̂��e�����Ȃ��؋��B
��Ԃ���`����ŕω����鎞�Ԃ��f�o�r�ɓK�p����̂͌��B
Wikipedia�Ŕ��f����H
�f�o�r�ɂ����鑊�Θ_�̕K�v����Wikipedia�ɂ������Ă���B
Wikipedia�͑P�ӂ̃{�����e�B�A���c�_�����č�鎫�����l�B
�ł��A������U���̂��߂̏����ݍ��킪���ɂȂ��Ă���B
���Θ_�W�҂ɗL���ȏ����݂△�f�폜�͗����ł��m�F�ł���B
�L�ۂ݂ɂ��Ȃ��ŁA�݂�ȂŌo�߂��Ď�����K�v�������l�B
point
�قƂ�ǂ��ׂĂ̑��Θ_�I�咣�́A
�{��ɓ����O�ł��łɊԈ���Ă���B
�ȒP�ŏ����I�Ȑ����ł��A���̔w�i�܂ł����̂ڂ��Ď����̓��ōl���悤���Ă��Ƃ��l�B
